
The field of soft robotics is emerging as a vital area of research that promises numerous practical applications, from wearable technology to assistive devices. As the quest continues for new methods to enhance the design and functionality of soft pneumatic actuators (FSPAs), recent findings published in *Scientific Reports* hint at an innovative pathway. This article delves into the groundbreaking research that employs Turing patterns to refine the development of FSPAs and explores the implications of these advancements in soft robotics.
Fabric-based soft pneumatic actuators (FSPAs) are a category of flexible devices that operate by inflating and deflating, allowing them to move or change shape in response to applied pressure. Unlike traditional rigid actuators, FSPAs offer a more adaptable and safe interaction with their environment, including humans and delicate objects. Their lightweight, flexible nature makes them particularly advantageous in applications such as robotic grippers, adaptive shelters, and wearable devices. However, despite their promise, traditional methods of designing and fabricating FSPAs are fraught with challenges, primarily due to their reliance on materials that may not deform predictably under pressure.
The team behind the recent research consists of experts from Toyota Central R&D Labs in Japan and Toyota Motor Engineering & Manufacturing in North America. Dr. Masato Tanaka, Dr. Tsuyoshi Nomura, and Dr. Yuyang Song formed a collaborative unit to tackle the existing shortcomings in soft robotic design. Dr. Tanaka articulated the underlying motivation: to create cost-effective FSPAs capable of controlled movement without the need for specialized technologies. By employing Alan Turing’s morphogenesis theory, which explains how natural patterns emerge from uniform states, the researchers aimed to integrate this concept into actuator design.
Turing patterns arise from a complex interplay of reaction and diffusion, where two interacting substances create patterns through a feedback mechanism. The implementation of these patterns in the fabric of FSPAs allows for dynamic movement through spatially organized material orientation. By utilizing a gradient-based orientation optimization method based on Turing patterns, the research team devised a way to enhance the surface texture of FSPAs, leading to improved shape-morphing capabilities.
The innovative approach departs from conventional design methods that typically utilize isotropic materials. Instead, by focusing on anisotropic properties, where material characteristics vary in different directions, the team has forged a new path for the practical application of soft actuators. This expands the possibilities for controlling movement and deformation predictively, minimizing trial and error in material selection and design.
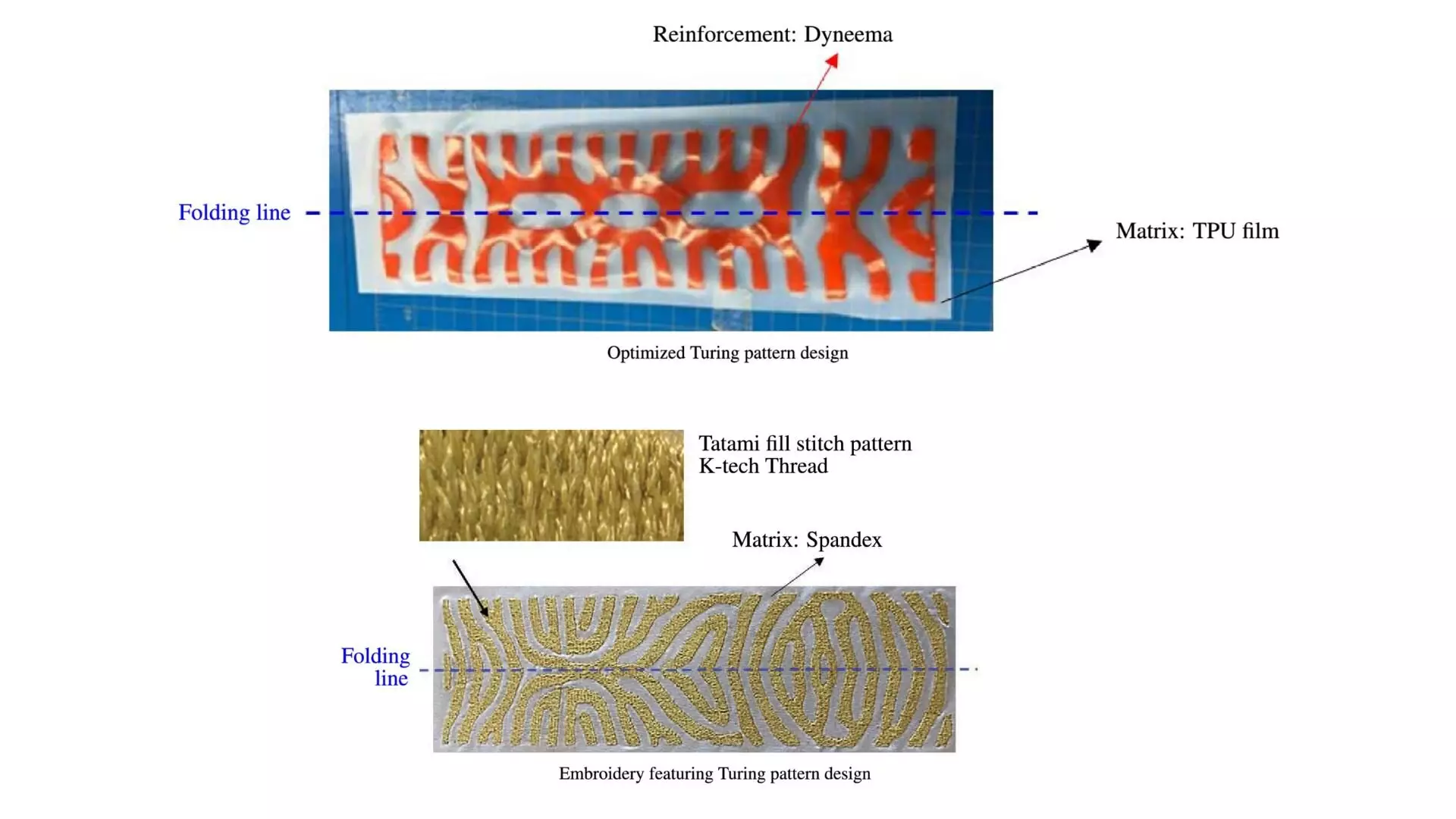
To bring this ambitious concept to fruition, the researchers adopted two primary fabrication techniques: heat bonding and embroidery. Heat bonding involves laser-cutting materials into specified Turing patterns, which are then adhered to softer fabrics using heat. Conversely, the embroidery method embeds Turing patterns directly into soft fabric, creating zones of varied stiffness that facilitate controlled motion. Both methods offer scalable and cost-effective solutions for producing advanced FSPAs.
Through their experimental processes, the research team compared the performance of their Turing pattern designs against conventional designs. Remarkably, the Turing patterns demonstrated superior functionality in numerous scenarios, particularly in C-shaped designs where they decreased the distance between actuator edges by approximately 10%. This optimization signifies a considerable advancement in achieving the desired motions with minimal pneumatic inputs.
The research team envisions further integration of Turing patterns with next-generation materials such as shape memory alloys and electroactive polymers. Such a combination could revolutionize actuator dynamics, enhancing responsiveness and versatility in soft robotic applications. Additionally, plans for scaling up production through methods like 3D printing or automated weaving promise to improve efficiency, facilitating the transition from experimental designs to practical, mass-produced devices.
As the field of soft robotics continues to evolve, the insights from this research illuminate a clear path forward, underscoring the importance of interdisciplinary collaboration and innovative thinking in developing next-generation robotic technologies. The implications of this study reach beyond theoretical advancements, potentially transforming the landscape of soft robotics and expanding its horizons in myriad applications in everyday life. The future holds exciting possibilities that hinge on the successful application of Turing patterns within the realm of fabric-based actuators.