
Human beings exhibit a remarkable ability to perform tasks that seem deceptively simple. For instance, when reaching for a book on a shelf, our brains process a myriad of sensory inputs without conscious effort, enabling us to navigate around various obstacles. In contrast, robotics researchers have faced persistent challenges in replicating this fluidity of movement within robotic systems. The crux of the issue lies in a critical aspect known as motion planning—the process by which robots are trained to retrieve objects without collateral damage or unintended mishaps. Traditional motion planning techniques falter in dynamic environments characterized by unpredictable variables, compelling researchers to seek innovative solutions that mirror human adaptability.
A pioneering team at Carnegie Mellon University’s Robotics Institute has embarked on an ambitious journey, unveiling a groundbreaking technique termed Neural Motion Planning. This method harnesses a sophisticated, data-driven artificial intelligence framework to empower robots engaged in motion planning within diverse, often unstructured household settings. These environments—ranging from common kitchen fixtures to cluttered living spaces—pose a significant challenge as they diverge from the predictable settings typically utilized for robotic training. As Murtaza Dalal, a doctoral student, succinctly points out, conventional algorithms struggle under such conditions; their inefficiency stems from the exhaustive collision detection processes that require time and extensive computational resources.
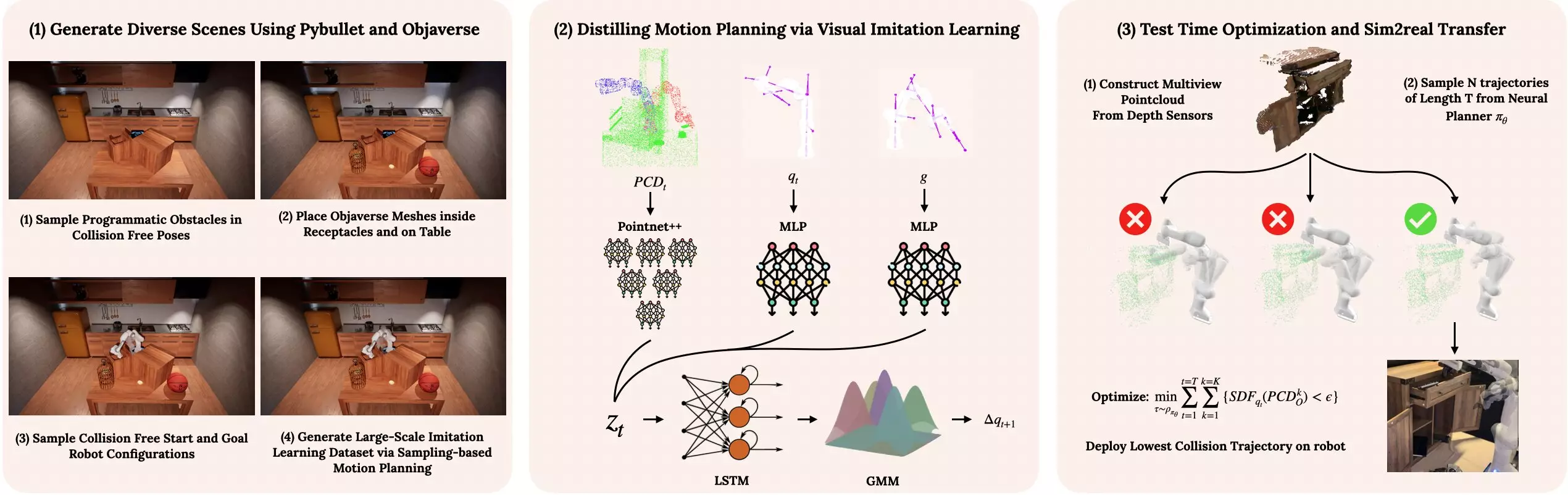
The innovative design of Neural Motion Planning drew inspiration from human cognitive development. When humans undertake new tasks, their behavior often transitions from tentative, slow movements to more assured and agile actions as they refine their skills. This model has been effectively replicated in robots through extensive simulations—each engineered to embody a myriad of complex household scenarios and unanticipated hurdles. By leveraging millions of unique situations, researchers have trained the AI to refine its approach to motion planning, enabling faster, contextually aware responses in uncharted territories. This extensive training framework equips robots with the ability to pivot between varying challenges in real-world applications, effectively diminishing the limitations experienced by traditional methods.
One of the remarkable aspects of Neural Motion Planning is its proficiency across different real-world contexts. By employing high-fidelity simulations that encompass a wide array of possible household obstacles—be it a misplaced toy, a furry pet, or simply the intricacies of furniture arrangement—the AI’s learning can extend beyond the narrow confines of its training environments. Deepak Pathak, an assistant professor within the institute, underscores the significance of this achievement by comparing the advancements made in machine learning for vision and language to the more nascent state of robotics and motion planning. He describes Neural Motion Planning as a vital stepping stone towards realizing the promise of highly adaptable robotic systems that can respond to a fluctuating array of environmental variables.
Experiments conducted in controlled laboratory settings have demonstrated the impressive capabilities of Neural Motion Planning when applied to robotic arms. With the aid of depth cameras generating a three-dimensional projection of their surroundings, the robots received precise positional data required to execute movements from defined start points to targeted endpoints. The results were encouraging; the robotic arms successfully navigated through common household obstacles with remarkable agility, effectively avoiding all manner of impediments while completing tasks. The excitement surrounding this technology reflects the broader implications it carries for the future of robotics, showcasing a potential paradigm shift in the way robots interact with their environments.
The Future of Robotic Interaction
As Neural Motion Planning continues to evolve, the implications for industries reliant on robotic support are profound. From domestic automation to sophisticated warehousing solutions, the capability for machines to navigate dynamic spaces autonomously heralds a new era of efficiency and functionality. While there remain challenges to tackle—such as further enhancing efficiency and adaptability—this pioneering research provides a significant foundation for future developments in robotics. The fusion of sophisticated AI and innovative motion planning techniques is set to transform how robots will function, bringing us closer to mimicking the fluidity and instinctiveness of human movements. The journey from simulation to reality promises advancements that could redefine interactions with robotic systems in everyday life.