
Robotic technology has made tremendous advancements in recent years, with the aim of assisting humans in performing daily tasks more efficiently. One of the key challenges in robotics is enabling robots to manipulate objects effectively and dexterously in various real-world settings. In a recent groundbreaking development, researchers at Improbable AI Lab and MIT have designed a new two-finger robotic gripper that shows great promise in tackling everyday manipulation tasks with ease and efficiency.
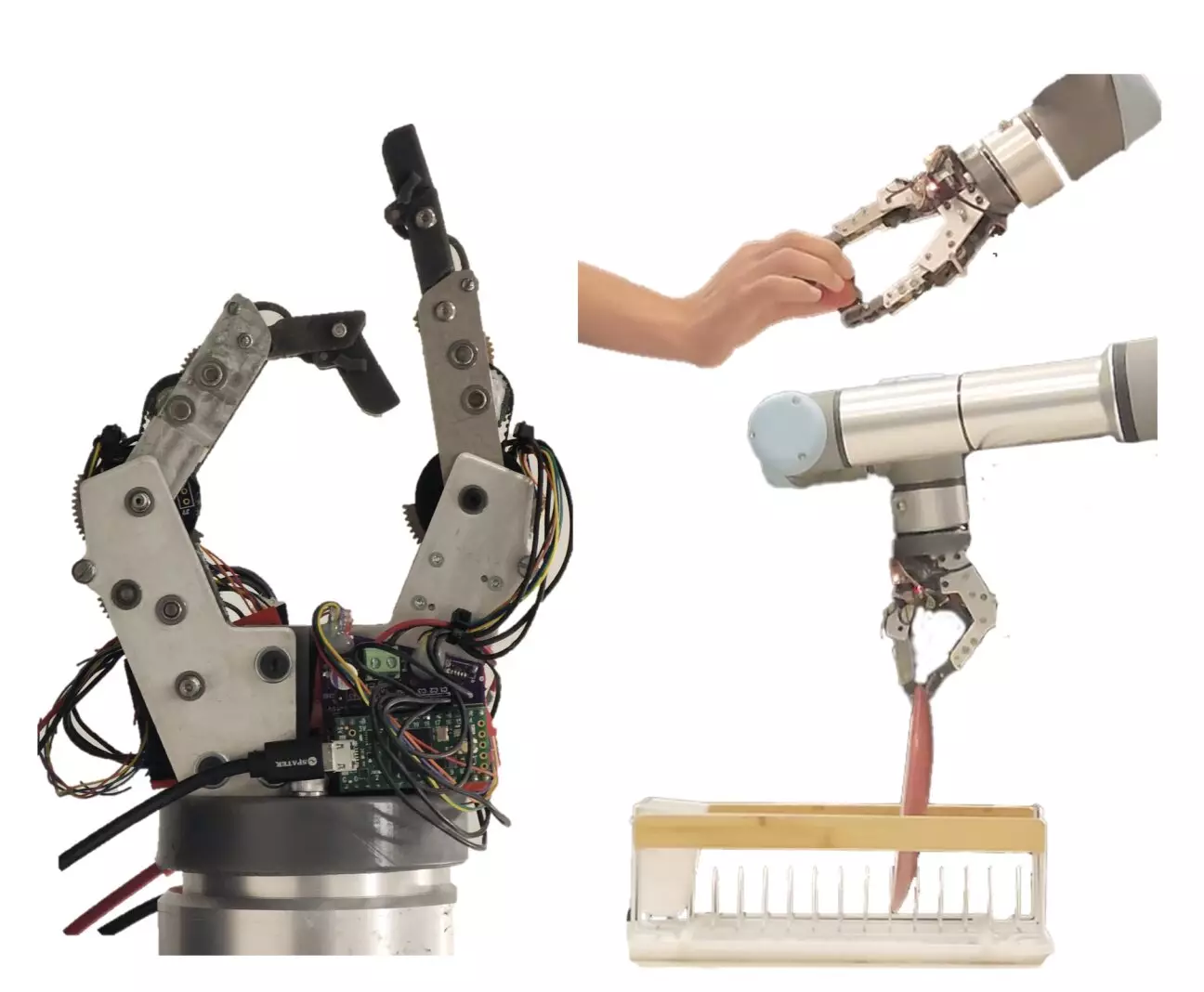
The robotic gripper developed by the research team consists of a structure with two robotic fingers that closely resemble human fingers in size and shape. These fingers are designed to bend and tightly grasp objects, allowing the robot to pick up objects of different shapes and textures and place them in specific locations. The focus of the researchers was to create a finger design that could perform a wide range of everyday tasks while maintaining compactness and optimal performance.
While the current robotic gripper has two degrees of freedom (DoF) with only two fingers, the researchers have plans to expand and improve the design in the future. They have expressed their intention to incorporate more fingers into the gripper, with the possibility of creating grippers with three or four fingers. The ultimate goal is to develop a full five-fingered hand, but this may require advancements in torque-dense actuators to make it a reality.
To assess the performance of their two-finger robotic gripper, the researchers conducted a series of real-world experiments. These experiments evaluated the speed, compliance, and force applied by the gripper when carrying out basic pick-and-place tasks. The results of the experiments were highly promising, with the robotic gripper successfully completing tasks such as picking and placing dishes, handling thin and delicate objects like paper and strawberries.
The successful performance of the two-finger robotic gripper in basic everyday tasks signifies a significant step forward in the development of household robots. While the tasks tested may seem simple, they closely mirror activities that humans engage in regularly. The potential for the robotic gripper to assist in household chores and other daily tasks is evident, highlighting its promise in enhancing human-robot interaction and cooperation.
The design and implementation of the two-finger robotic gripper by researchers at Improbable AI Lab and MIT represent a significant breakthrough in the field of robotics. The gripper’s ability to manipulate objects effectively and perform basic tasks with precision opens up a world of possibilities for the development of advanced robotic systems. With further refinement and experimentation, the future of robotic grippers holds great potential for revolutionizing human-robot collaboration in various settings.